All the signals has sampling rate \(F_s\)
The white noise with zero mean and \(\sigma^2\) variance, it has PSD
\[S(f) = \dfrac{\sigma^2}{F_s / 2}\]Discrete-Time Integration
\[\dfrac{1}{s} \approx T_s \cdot \dfrac{z^{-1}}{1-z^{-1}} = \dfrac{T_s}{z - 1}\] \[\dfrac{1}{1-z^{-1}} \approx \dfrac{F_s}{s}\] \[\bigg\vert \dfrac{1}{1-e^{-j2\pi f / F_s}} \bigg\vert^2 \approx \bigg\vert \dfrac{1}{2\pi f / F_s} \bigg\vert^2\]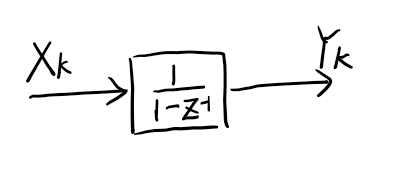
and
\[Y_0 = X_0\]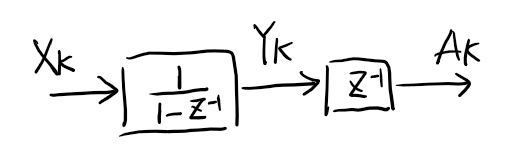
thus
\[A_{k} = A_{k-1} + X_{k-1}, \quad \forall k \ge 1\]and
\[A_0 = 0\]