for \(LC\) oscillator, take the simple model shown below
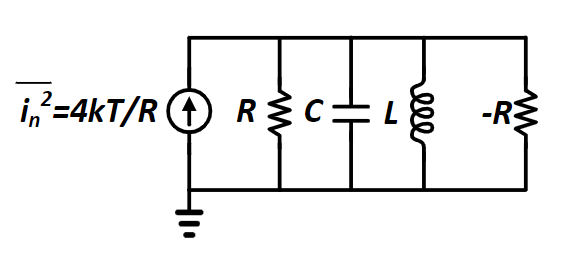
where
\[\begin{align} Q &= \dfrac{R}{\omega_0 L}\\ \omega_0 &= \dfrac{1}{\sqrt{LC}} \end{align}\]If we use such implementation like below
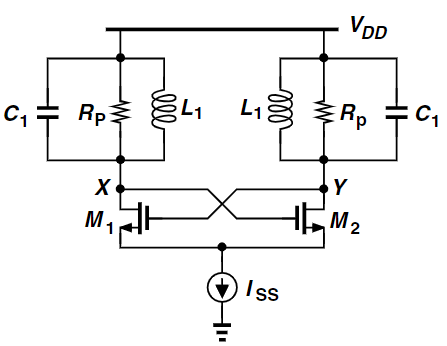
It has a peak differential output swing of
\[V_{XY} \approx \dfrac{4}{\pi} I_{ss}R_p\]VCO Model Specification
Let’s specify \(V_0, P_{\mathrm{VCO}}, \mathrm{FOM_{VCO}}\)
\[\begin{align} P_{\mathrm{VCO}} &= \dfrac{V_0^2}{2R_p}\\ R_p &= \dfrac{V_0^2}{2 P_{\mathrm{VCO}}}\\ Q^2 &= \dfrac{kT}{1mW} \cdot 10^{-\mathrm{FOM_{VCO}}/10}\\ Q &= \sqrt{\dfrac{kT}{1mW} \cdot 10^{-\mathrm{FOM_{VCO}}/10}}\\ L_1 &= \dfrac{R_p}{2\pi f_{target} Q}\\ I_{ss} &= \dfrac{V_0}{R_p} \cdot \dfrac{\pi}{4}\\ g_m &= \dfrac{2}{R_p} = \sqrt{4 K_N \cdot \dfrac{1}{2} I_{ss}}\\ K_N &= \dfrac{2}{I_{ss} R_p^2} \end{align}\]let the control voltage range from \(V_{cl}\) to \(V_{ch}\)
\[C_x = C_m \dfrac{V_{ch} - V_{x}}{V_{ch} - V_{cl}}\]we can specify \(f_{min}, f_{max}\), let’s have
\[\begin{align} f_{min} &= \dfrac{1}{2\pi \sqrt{L_1 (C_1 + C_m)}}\\ f_{max} &= \dfrac{1}{2\pi\sqrt{L_1 C_1}} \end{align}\] \[\begin{align} C_1 &= \dfrac{1}{L_1 \cdot (2\pi f_{max})^2}\\ C_m &= \dfrac{1}{L_1 \cdot (2\pi f_{min})^2} - \dfrac{1}{L_1 \cdot (2\pi f_{max})^2}\\ K_{\mathrm{VCO}} &\approx \dfrac{2\pi (f_{max} - f_{min})}{V_{ch}-V_{cl}} \end{align}\]Summary
In summary, the value we specified is
| \(V_0\) | \(P_{\mathrm{VCO}}\) | \(\mathrm{FOM_{VCO}}\) | \(V_{cl}\) | \(V_{ch}\) | \(f_{min}\) | \(f_{target}\) | \(f_{max}\) |